ตัวควบคุม PID คืออะไร?
คำว่า PID ย่อมาจากอนุพันธ์อินทิกรัลตามสัดส่วน และ เป็นอุปกรณ์ประเภทหนึ่งที่ใช้ในการควบคุมตัวแปร กระบวนการต่างๆ เช่น ความดัน การไหล อุณหภูมิ และ ความเร็วในงานอุตสาหกรรม ในคอนโทรลเลอร์นี้ อุปกรณ์ป้อนกลับแบบลูปควบคุมใช้ เพื่อควบคุมตัวแปรกระบวนการทั้งหมด การควบคุมประเภทนี้ใช้เพื่อขับเคลื่อนระบบไปในทิศทางของตำแหน่งเป้าหมาย หรือ ระดับอื่น มีเกือบทุกที่สำหรับการควบคุมอุณหภูมิ และ ใช้ในกระบวนการทางวิทยาศาสตร์ ระบบอัตโนมัติ และ สารเคมี ในคอนโทรลเลอร์นี้ ฟีดแบ็คเป็นแบบลูปปิด (Close Loop) จะใช้เพื่อรักษาเอาท์พุตจริง
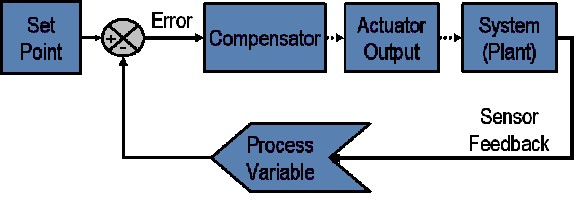
ระบบควบคุม แนวคิดพื้นฐานเบื้องหลังคอนโทรลเลอร์ PID คือ การอ่านเซ็นเซอร์ จากนั้นจึงคำนวณเอาต์พุต Actuator ที่ต้องการโดยคำนวณการตอบสนองตามสัดส่วน ปริพันธ์ และอนุพันธ์ แล้วรวมส่วนประกอบทั้งสามนี้เพื่อคำนวณเอาต์พุต ก่อนที่เราจะเริ่มต้นกำหนดพารามิเตอร์ของตัวควบคุม PID เราจะดูว่าระบบวงปิดคืออะไรและคำศัพท์บางคำที่เกี่ยวข้องกัน
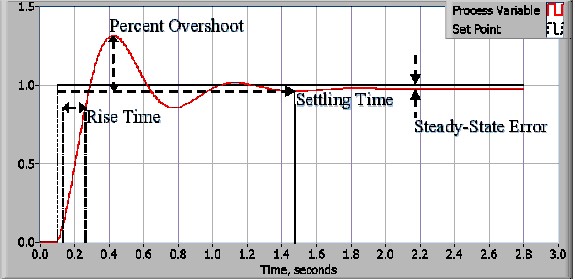
กระบวนการ ออกแบบการควบคุม เริ่มต้นด้วยการกำหนดข้อกำหนดด้านประสิทธิภาพ ประสิทธิภาพของระบบควบคุมมักจะวัดโดยการใช้ฟังก์ชันขั้นตอนเป็นตัวแปรคำสั่ง set point จากนั้นจึงวัดการตอบสนองของตัวแปรกระบวนการ โดยทั่วไป การตอบสนองจะถูกหาปริมาณโดยการวัดคุณลักษณะของรูปคลื่นที่กำหนดไว้ เวลาที่เพิ่มขึ้นคือระยะเวลาที่ระบบใช้ในการเปลี่ยนจาก 10% เป็น 90% ของค่าสถานะคงตัวหรือค่าสุดท้าย เปอร์เซ็นต์โอเวอร์ชูตคือจำนวนที่ตัวแปรกระบวนการโอเวอร์ชูตค่าสุดท้าย ซึ่งแสดงเป็นเปอร์เซ็นต์ของค่าสุดท้าย เวลาในการชำระเป็นเวลาที่ตัวแปรกระบวนการต้องชำระภายในเปอร์เซ็นต์ที่กำหนด (โดยทั่วไปคือ 5%) ของค่าสุดท้าย ข้อผิดพลาด Steady-State คือความแตกต่างสุดท้ายระหว่างตัวแปรกระบวนการและจุดตั้งค่า
แหล่งความรู้ PID
https://www.teachmemicro.com/arduino-pid-control-tutorial/




